Lane Tracking via Computer Vision
As part of the first term of my Udacity Self-Driving Car program many topics relating to computer vision and how they integrate into driving a car were though, involving many projects that may be encountered in real-life attempts at programming an autonomous car.
Here I will walk through the steps I used and the techniques involved.
Some techniques involved:
- Image calibration and transformation
- Image thresholding via gradients
- Regression to track lane curvature
Calibrating and Transforming Perspective
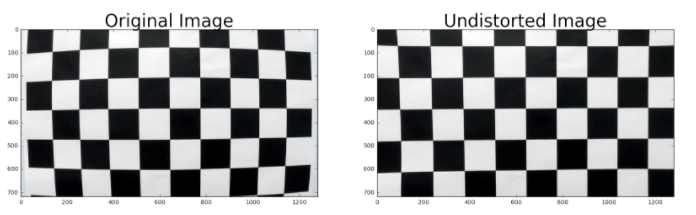
The lens of every came increases a slight portion of distortion within the images it captures, especially around the corners. Using a printed chessboard image and then tracking the corners with a function from OpenCV, the image can be transformed slightly to straighten out the lines, and then apply that transformation to subsequent images of the camera. Below is an example of image un-distortion:
def toCalibrate(img,nx,ny):
objpoints = []
imgpoints = []
objp = np.zeros((nx*ny, 3), np.float32)
objp[:,:2] = np.mgrid[0:nx,0:ny].T.reshape(-1,2) # x,y coordinates
# Find chessboard corners
ret, corners= cv2.findChessboardCorners(img, (nx,ny), None)
# If found, draw corners
if ret == True:
# Draw and display the corners
cv2.drawChessboardCorners(img, (nx, ny), corners, ret)
imgpoints.append(corners)
objpoints.append(objp)
plt.suptitle('Original', fontsize=14, fontweight='bold')
plt.imshow(img)
plt.show()
global mtx
global dist
global rvecs
global tvecs
global undist
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, toGray(img).shape[::-1], None, None)
undist = cv2.undistort(img, mtx, dist, None, mtx)
plt.suptitle('Undistorted', fontsize=14, fontweight='bold')
plt.imshow(undist)
plt.show()
if ret == False:
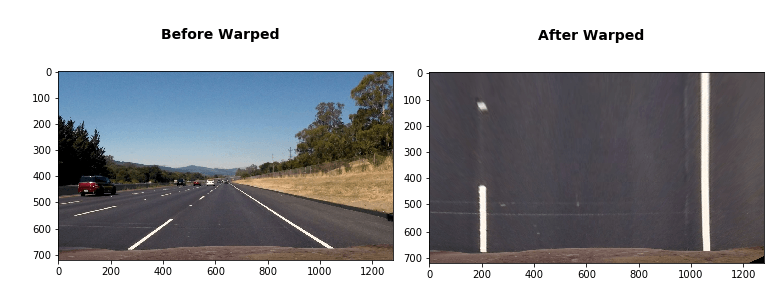
print('Did not find any corners')Next I need to transform the image from having a driver POV to a birds eye POV. This can be accomplished with the OpenCV function warpPerspective.
def toWarp(img,src,dst):
# Grab the image shape
if len(np.shape(img)) > 2:
img_size = (toGray(img).shape[1], toGray(img).shape[0])
else:
img_size = (img.shape[1], img.shape[0])
#im2 = img.reshape(img.shape[0], img.shape[1])
plt.suptitle('Before Warped', fontsize=14, fontweight='bold')
plt.imshow(img)
plt.show()
#print(np.shape(gray))
# Given src and dst points, calculate the perspective transform matrix
M = cv2.getPerspectiveTransform(src, dst)
# Warp the image using OpenCV warpPerspective()
warped = cv2.warpPerspective(img, M, img_size)
plt.suptitle('After Warped', fontsize=14, fontweight='bold')
plt.imshow(warped)
plt.show()
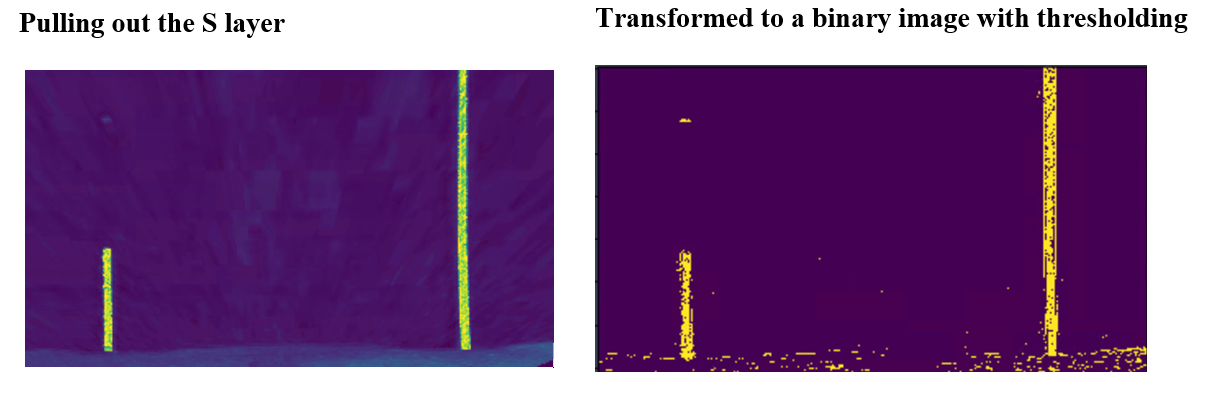
return warped, MBinary Transformation for explicit lane identification
I performed a transformation of color channels to HLS and then pulled out the S layer as it seemed to perform the best in making the lane line stand out. Then using gradient thresholds to generate a binary image (values are either 0 or 255). The threshold values I used were 10 and 100. Below is an example of my output for this step.
# for a given sobel kernel size and threshold values
def toMagSobel(img, sobel_kernel=3, mag_thresh=(0, 255)):
# Convert to grayscale
if len(np.shape(img)) > 2:
gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
else:
gray = img
# Take both Sobel x and y gradients
sobelx = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=sobel_kernel)
sobely = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=sobel_kernel)
# Calculate the gradient magnitude
gradmag = np.sqrt(sobelx**2 + sobely**2)
# Rescale to 8 bit
scale_factor = np.max(gradmag)/255
gradmag = (gradmag/scale_factor).astype(np.uint8)
# Create a binary image of ones where threshold is met, zeros otherwise
binary_output = np.zeros_like(gradmag)
binary_output[(gradmag >= mag_thresh[0]) & (gradmag <= mag_thresh[1])] = 1
plt.suptitle('After Binary Mag Sobel', fontsize=14, fontweight='bold')
plt.imshow(binary_output)
plt.show()
# Return the binary image
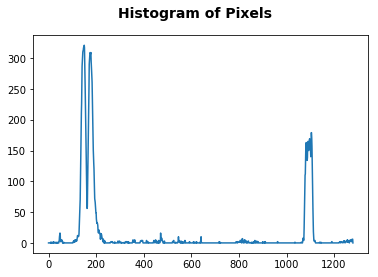
return binary_outputPlot a Histogram of Pixel Values
Now if we plot a histogram of the pixel values on the X-axis, it starts to really stand out where the lanes reside in the image.
plt.suptitle('After Sobel Binary', fontsize=14, fontweight='bold')
plt.imshow(step2)
plt.show()
histogram = np.sum(step2[step2.shape[0]//2:,:], axis=0)
plt.suptitle('Histogram of Pixels', fontsize=14, fontweight='bold')
plt.plot(histogram)
plt.show()
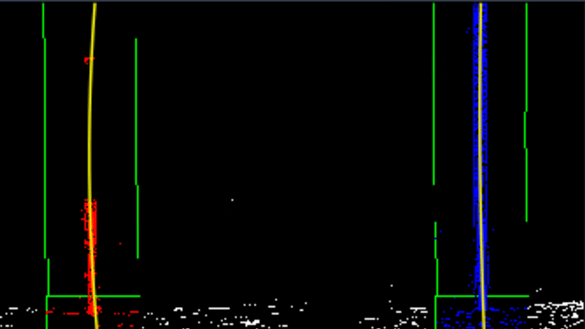
Sliding Window Detection
Breaking up the image height-wise into a series of sliding windows I can continually find the pixel locations and begin to mark the lane locations. In the below image you can see the result of this effort. Though there were some issues drawing the window rectangles, it performed well enough in practice. It uses a total of 9 windows on each lane to then track midpoint concentration of pixels, to best fit the lane line.
def regressionLanesTracker(src):
binary_warped = src
# Assuming you have created a warped binary image called "binary_warped"
# Take a histogram of the bottom half of the image
histogram = np.sum(binary_warped[int(binary_warped.shape[0]/2):,:], axis=0)
# Create an output image to draw on and visualize the result
out_img = np.dstack((binary_warped, binary_warped, binary_warped))*255
# Find the peak of the left and right halves of the histogram
# These will be the starting point for the left and right lines
midpoint = np.int_(histogram.shape[0]/2)
leftx_base = np.argmax(histogram[:midpoint])
rightx_base = np.argmax(histogram[midpoint:]) + midpoint
# Choose the number of sliding windows
nwindows = 9
# Set height of windows
window_height = np.int_(binary_warped.shape[0]/nwindows)
# Identify the x and y positions of all nonzero pixels in the image
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Current positions to be updated for each window
leftx_current = leftx_base
rightx_current = rightx_base
# Set the width of the windows +/- margin
margin = 100
# Set minimum number of pixels found to recenter window
minpix = 50
# Create empty lists to receive left and right lane pixel indices
left_lane_inds = []
right_lane_inds = []
# Step through the windows one by one
for window in range(nwindows):
# Identify window boundaries in x and y (and right and left)
win_y_low = binary_warped.shape[0] - (window+1)*window_height
win_y_high = binary_warped.shape[0] - window*window_height
win_xleft_low = leftx_current - margin
win_xleft_high = leftx_current + margin
win_xright_low = rightx_current - margin
win_xright_high = rightx_current + margin
# Draw the windows on the visualization image
cv2.rectangle(out_img,(win_xleft_low,win_y_low),(win_xleft_high,win_y_high),(0,255,0), 2)
cv2.rectangle(out_img,(win_xright_low,win_y_low),(win_xright_high,win_y_high),(0,255,0), 2)
# Identify the nonzero pixels in x and y within the window
good_left_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox >= win_xleft_low) & (nonzerox < win_xleft_high)).nonzero()[0]
good_right_inds = ((nonzeroy >= win_y_low) & (nonzeroy < win_y_high) & (nonzerox >= win_xright_low) & (nonzerox < win_xright_high)).nonzero()[0]
# Append these indices to the lists
left_lane_inds.append(good_left_inds)
right_lane_inds.append(good_right_inds)
# If you found > minpix pixels, recenter next window on their mean position
if len(good_left_inds) > minpix:
leftx_current = np.int_(np.mean(nonzerox[good_left_inds]))
if len(good_right_inds) > minpix:
rightx_current = np.int_(np.mean(nonzerox[good_right_inds]))
# Concatenate the arrays of indices
left_lane_inds = np.concatenate(left_lane_inds)
right_lane_inds = np.concatenate(right_lane_inds)
# Extract left and right line pixel positions
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
# Fit a second order polynomial to each
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
# Generate x and y values for plotting
ploty = np.linspace(0, binary_warped.shape[0]-1, binary_warped.shape[0] )
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]
# Plot it!
out_img[nonzeroy[left_lane_inds], nonzerox[left_lane_inds]] = [255, 0, 0]
out_img[nonzeroy[right_lane_inds], nonzerox[right_lane_inds]] = [0, 0, 255]
plt.imshow(out_img)
plt.plot(left_fitx, ploty, color='yellow')
plt.plot(right_fitx, ploty, color='yellow')
plt.xlim(0, 1280)
plt.ylim(720, 0)
plt.show()
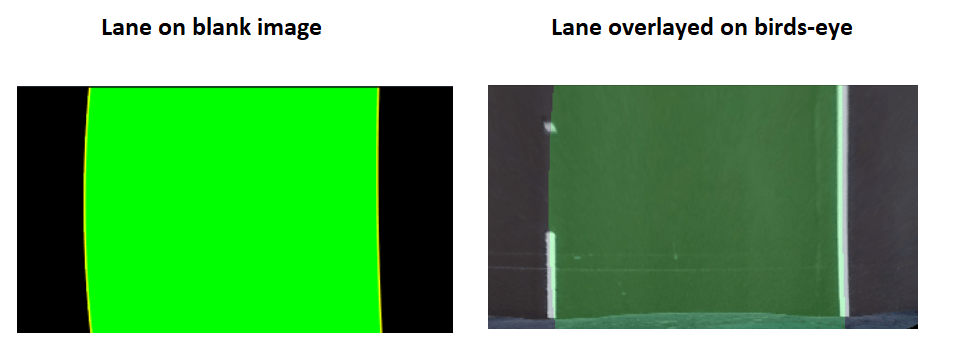
Overlay a Polygon to Fill Lanes
Once I have these lines digital lines fitted over the image of lane lines, I can use another OpenCV function to fill in a polygon and ‘draw’ a virtual lane into the birds-eye image. This function, fillPoly creates a basic polygon on a blank image, then I can use the addWeighted function to overlay it (with transparency) on to the original lane image, by first placing it on birds-eye then warping back to original.
"""
Add polygon and Overlay and Warp
"""
def polygonOverlay(src):
binary_warped = src
# Create an image to draw the lines on
warp_zero = np.zeros_like(binary_warped).astype(np.uint8)
color_warp = np.dstack((warp_zero, warp_zero, warp_zero))
# Recast the x and y points into usable format for cv2.fillPoly()
pts_left = np.array([np.transpose(np.vstack([left_fitx, ploty]))])
pts_right = np.array([np.flipud(np.transpose(np.vstack([right_fitx, ploty])))])
pts = np.hstack((pts_left, pts_right))
# Draw the lane onto the blank image
cv2.fillPoly(color_warp, np.int_([pts]), (0,255, 0))
plt.imshow(color_warp)
plt.plot(left_fitx, ploty, color='yellow')
plt.plot(right_fitx, ploty, color='yellow')
plt.suptitle('lanes', fontsize=14, fontweight='bold')
plt.show()
#toWarp(fig,src=src,dst=dst)
# Overlay polygon on birdseye
step00 = step0.copy()
alpha = 0.2
temp = cv2.addWeighted(color_warp, alpha, step00, 1 - alpha,0, step00)
plt.imshow(temp)
plt.suptitle('lanes birdeye', fontsize=14, fontweight='bold')
plt.show()
# Un-un-warp function
def unwarp(warped, M):
img = warped
img_size = (img.shape[1], img.shape[0])
return cv2.warpPerspective(warped, M, img_size,
flags=cv2.WARP_INVERSE_MAP)
# Present basic transformation of polygon
tt = unwarp(color_warp, M)
plt.imshow(tt)
plt.show()
# Create copy (so addWeighted does not stack)
tt_copy = tt.copy()
# Overlay the image
alpha = .3
temp = cv2.addWeighted(tt_copy, .3, test_images[6],1,0)
plt.imshow(cv2.cvtColor(temp, cv2.COLOR_BGR2RGB))
plt.show()
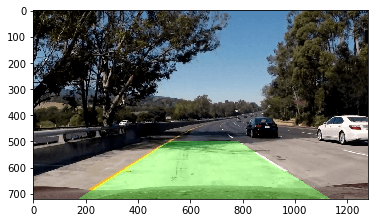
Final Steps
Now I just take the lane plotted back on to the video feed, with detected lane line curves also overlaid onto the image, along with the curves printed in the top-left corner (radius in meters).

Originally published on Medium.